
Feeds
stow @ Savannah: GNU Stow 2.4.1 released
Stow 2.4.1 has been released. This release contains some minor bug-fixes -- specifically, fixing the --dotfiles option to work correctly with ignore lists, allowing options in .stowrc with spaces, and avoiding a spurious warning on Perl >= 5.40. There were also some clean-ups and improvements, mostly internal and not visible to users. Read details of what's new: http://git.savannah.gnu.org/cgit/stow.git/tree/NEWS
Dima Kogan: GNU Make: details regarding intermediate files
Suppose I have this Makefile:
a: b touch $@ b: touch $@ # A common chain of build steps %-GENERATED.c: %-generate touch $@ %.o: %.c touch $@ %.so: %-GENERATED.o touch $@ xxx-GENERATED.o: CFLAGS += adsf # Imitates .d files created with "gcc -MMD". Does not exist on the initial build ifneq ($(wildcard xxx.so),) xxx-GENERATED.o: xxx-GENERATED.c endifThis is all very simple build-system stuff. Let's see how it works:
$ rm -rf a b xxx-GENERATED.c xxx-GENERATED.o xxx.so [start from a clean slate] $ touch xxx-generate xxx.h [Files that would be available in a project exist; xxx-generate is some tool] [that would generate xxx-GENERATED.c ] $ touch a ["a" exists but the file "b" it depends on does not] $ make a xxx.so touch b touch a touch xxx-GENERATED.c touch xxx-GENERATED.o touch xxx.so rm xxx-GENERATED.c [It built everything, but then deleted xxx-GENERATED.c] $ make a xxx.so remake: 'a' is up to date. touch xxx-GENERATED.c touch xxx-GENERATED.o touch xxx.so [It knew to not rebuild "a", but the missing xxx-GENERATED.c caused it to] [re-build stuff ]Well that's not good. What if we add .SECONDARY: to the end of the Makefile to mark everything as a secondary file?
$ rm -rf a b xxx-GENERATED.c xxx-GENERATED.o xxx.so $ touch xxx-generate xxx.h $ touch a $ make a xxx.so remake: 'a' is up to date. touch xxx-GENERATED.c touch xxx-GENERATED.o touch xxx.so [It didn't bother rebuilding "a" even though its prerequisites "b" doesn't] [exist. But it didn't delete the xxx-GENERATED.c at least ] $ make a xxx.so remake: 'a' is up to date. remake: 'xxx.so' is up to date. [It knew to not rebuild anything. Great.]So it doesn't work right with or without .SECONDARY:, but it's much closer with it. The solution is to mark everything as not an intermediate file. mrbuild cannot do this without a bleeding-edge version of GNU Make, but users of mrbuild can do this by explicitly mentioning specific files in rules. This would suffice:
___dummy___: file1 file2Detailed notes are in a commit in mrbuild (mrbuild 1.13) and in a post to LKML by Masahiro Yamada.
Antonio Terceiro: gotcha: using ccache in Debian package builds
Before I upload packages to Debian, I always do a full build from source under sbuild. This ensures that the package can build from source on a clean environment, implying that the set of build dependencies is complete.
But when iterating on a non-trivial package locally, I will usually build the package directly on my Debian testing system, and I want to take advantage of ccache to cache native (C/C++) code compilation to speed things up. In Debian, the easiest way to enable ccache is to add /usr/lib/ccache to your $PATH. I do this by doing something similar to the following in my ~/.bashrc:
export PATH=/usr/lib/ccache:$PATHI noticed, however, that my Debian package builds were not using the cache. When building the same small package manually using make, the cache was used, but not when the build was wrapped with dpkg-buildpackage.
I tracked it down to the fact that in compatibility level 13+, debhelper will set $HOME to a temporary directory. For what's it worth, I think that's a good thing: you don't want package builds reaching for your home directory as that makes it harder to make builds reproducible, among other things.
This behavior, however, breaks ccache. The default cache directory is $HOME/.ccache, but that only gets resolved when ccache is actually used. So we end up starting with an empty cache on each build, get a 100% cache miss rate, and still pay for the overhead of populating the cache.
The fix is to explicitly set $CCACHE_DIR upfront, so that by the time $HOME gets overriden, it doesn't matter anymore for ccache. I did this in my ~/.bashrc:
export CCACHE_DIR=$HOME/.ccacheThis way, $HOME will be expanded right there when the shell starts, and by the time ccache is called, it will use the persistent cache in my home directory when though $HOME will then point to a temporary directory.
The Drop Times: Drupal.org Gets a Makeover with New Fonts
Jacob Adams: Linux's Bedtime Routine
How does Linux move from an awake machine to a hibernating one? How does it then manage to restore all state? These questions led me to read way too much C in trying to figure out how this particular hardware/software boundary is navigated.
This investigation will be split into a few parts, with the first one going from invocation of hibernation to synchronizing all filesystems to disk.
This article has been written using Linux version 6.9.9, the source of which can be found in many places, but can be navigated easily through the Bootlin Elixir Cross-Referencer:
https://elixir.bootlin.com/linux/v6.9.9/source
Each code snippet will begin with a link to the above giving the file path and the line number of the beginning of the snippet.
A Starting Point for Investigation: /sys/power/state and /sys/power/diskThese two system files exist to allow debugging of hibernation, and thus control the exact state used directly. Writing specific values to the state file controls the exact sleep mode used and disk controls the specific hibernation mode1.
This is extremely handy as an entry point to understand how these systems work, since we can just follow what happens when they are written to.
Show and Store FunctionsThese two files are defined using the power_attr macro:
#define power_attr(_name) \ static struct kobj_attribute _name##_attr = { \ .attr = { \ .name = __stringify(_name), \ .mode = 0644, \ }, \ .show = _name##_show, \ .store = _name##_store, \ }show is called on reads and store on writes.
state_show is a little boring for our purposes, as it just prints all the available sleep states.
/* * state - control system sleep states. * * show() returns available sleep state labels, which may be "mem", "standby", * "freeze" and "disk" (hibernation). * See Documentation/admin-guide/pm/sleep-states.rst for a description of * what they mean. * * store() accepts one of those strings, translates it into the proper * enumerated value, and initiates a suspend transition. */ static ssize_t state_show(struct kobject *kobj, struct kobj_attribute *attr, char *buf) { char *s = buf; #ifdef CONFIG_SUSPEND suspend_state_t i; for (i = PM_SUSPEND_MIN; i < PM_SUSPEND_MAX; i++) if (pm_states[i]) s += sprintf(s,"%s ", pm_states[i]); #endif if (hibernation_available()) s += sprintf(s, "disk "); if (s != buf) /* convert the last space to a newline */ *(s-1) = '\n'; return (s - buf); }state_store, however, provides our entry point. If the string “disk” is written to the state file, it calls hibernate(). This is our entry point.
static ssize_t state_store(struct kobject *kobj, struct kobj_attribute *attr, const char *buf, size_t n) { suspend_state_t state; int error; error = pm_autosleep_lock(); if (error) return error; if (pm_autosleep_state() > PM_SUSPEND_ON) { error = -EBUSY; goto out; } state = decode_state(buf, n); if (state < PM_SUSPEND_MAX) { if (state == PM_SUSPEND_MEM) state = mem_sleep_current; error = pm_suspend(state); } else if (state == PM_SUSPEND_MAX) { error = hibernate(); } else { error = -EINVAL; } out: pm_autosleep_unlock(); return error ? error : n; } static suspend_state_t decode_state(const char *buf, size_t n) { #ifdef CONFIG_SUSPEND suspend_state_t state; #endif char *p; int len; p = memchr(buf, '\n', n); len = p ? p - buf : n; /* Check hibernation first. */ if (len == 4 && str_has_prefix(buf, "disk")) return PM_SUSPEND_MAX; #ifdef CONFIG_SUSPEND for (state = PM_SUSPEND_MIN; state < PM_SUSPEND_MAX; state++) { const char *label = pm_states[state]; if (label && len == strlen(label) && !strncmp(buf, label, len)) return state; } #endif return PM_SUSPEND_ON; }Could we have figured this out just via function names? Sure, but this way we know for sure that nothing else is happening before this function is called.
AutosleepOur first detour is into the autosleep system. When checking the state above, you may notice that the kernel grabs the pm_autosleep_lock before checking the current state.
autosleep is a mechanism originally from Android that sends the entire system to either suspend or hibernate whenever it is not actively working on anything.
This is not enabled for most desktop configurations, since it’s primarily for mobile systems and inverts the standard suspend and hibernate interactions.
This system is implemented as a workqueue2 that checks the current number of wakeup events, processes and drivers that need to run3, and if there aren’t any, then the system is put into the autosleep state, typically suspend. However, it could be hibernate if configured that way via /sys/power/autosleep in a similar manner to using /sys/power/state to manually enable hibernation.
static ssize_t autosleep_store(struct kobject *kobj, struct kobj_attribute *attr, const char *buf, size_t n) { suspend_state_t state = decode_state(buf, n); int error; if (state == PM_SUSPEND_ON && strcmp(buf, "off") && strcmp(buf, "off\n")) return -EINVAL; if (state == PM_SUSPEND_MEM) state = mem_sleep_current; error = pm_autosleep_set_state(state); return error ? error : n; } power_attr(autosleep); #endif /* CONFIG_PM_AUTOSLEEP */ static DEFINE_MUTEX(autosleep_lock); static struct wakeup_source *autosleep_ws; static void try_to_suspend(struct work_struct *work) { unsigned int initial_count, final_count; if (!pm_get_wakeup_count(&initial_count, true)) goto out; mutex_lock(&autosleep_lock); if (!pm_save_wakeup_count(initial_count) || system_state != SYSTEM_RUNNING) { mutex_unlock(&autosleep_lock); goto out; } if (autosleep_state == PM_SUSPEND_ON) { mutex_unlock(&autosleep_lock); return; } if (autosleep_state >= PM_SUSPEND_MAX) hibernate(); else pm_suspend(autosleep_state); mutex_unlock(&autosleep_lock); if (!pm_get_wakeup_count(&final_count, false)) goto out; /* * If the wakeup occurred for an unknown reason, wait to prevent the * system from trying to suspend and waking up in a tight loop. */ if (final_count == initial_count) schedule_timeout_uninterruptible(HZ / 2); out: queue_up_suspend_work(); } static DECLARE_WORK(suspend_work, try_to_suspend); void queue_up_suspend_work(void) { if (autosleep_state > PM_SUSPEND_ON) queue_work(autosleep_wq, &suspend_work); } The Steps of Hibernation Hibernation Kernel ConfigIt’s important to note that most of the hibernate-specific functions below do nothing unless you’ve defined CONFIG_HIBERNATION in your Kconfig4. As an example, hibernate itself is defined as the following if CONFIG_HIBERNATE is not set.
static inline int hibernate(void) { return -ENOSYS; } Check if Hibernation is AvailableWe begin by confirming that we actually can perform hibernation, via the hibernation_available function.
if (!hibernation_available()) { pm_pr_dbg("Hibernation not available.\n"); return -EPERM; } bool hibernation_available(void) { return nohibernate == 0 && !security_locked_down(LOCKDOWN_HIBERNATION) && !secretmem_active() && !cxl_mem_active(); }nohibernate is controlled by the kernel command line, it’s set via either nohibernate or hibernate=no.
security_locked_down is a hook for Linux Security Modules to prevent hibernation. This is used to prevent hibernating to an unencrypted storage device, as specified in the manual page kernel_lockdown(7). Interestingly, either level of lockdown, integrity or confidentiality, locks down hibernation because with the ability to hibernate you can extract bascially anything from memory and even reboot into a modified kernel image.
secretmem_active checks whether there is any active use of memfd_secret, and if so it prevents hibernation. memfd_secret returns a file descriptor that can be mapped into a process but is specifically unmapped from the kernel’s memory space. Hibernating with memory that not even the kernel is supposed to access would expose that memory to whoever could access the hibernation image. This particular feature of secret memory was apparently controversial, though not as controversial as performance concerns around fragmentation when unmapping kernel memory (which did not end up being a real problem).
cxl_mem_active just checks whether any CXL memory is active. A full explanation is provided in the commit introducing this check but there’s also a shortened explanation from cxl_mem_probe that sets the relevant flag when initializing a CXL memory device.
* The kernel may be operating out of CXL memory on this device, * there is no spec defined way to determine whether this device * preserves contents over suspend, and there is no simple way * to arrange for the suspend image to avoid CXL memory which * would setup a circular dependency between PCI resume and save * state restoration. Check CompressionThe next check is for whether compression support is enabled, and if so whether the requested algorithm is enabled.
/* * Query for the compression algorithm support if compression is enabled. */ if (!nocompress) { strscpy(hib_comp_algo, hibernate_compressor, sizeof(hib_comp_algo)); if (crypto_has_comp(hib_comp_algo, 0, 0) != 1) { pr_err("%s compression is not available\n", hib_comp_algo); return -EOPNOTSUPP; } }The nocompress flag is set via the hibernate command line parameter, setting hibernate=nocompress.
If compression is enabled, then hibernate_compressor is copied to hib_comp_algo. This synchronizes the current requested compression setting (hibernate_compressor) with the current compression setting (hib_comp_algo).
Both values are character arrays of size CRYPTO_MAX_ALG_NAME (128 in this kernel).
static char hibernate_compressor[CRYPTO_MAX_ALG_NAME] = CONFIG_HIBERNATION_DEF_COMP; /* * Compression/decompression algorithm to be used while saving/loading * image to/from disk. This would later be used in 'kernel/power/swap.c' * to allocate comp streams. */ char hib_comp_algo[CRYPTO_MAX_ALG_NAME];hibernate_compressor defaults to lzo if that algorithm is enabled, otherwise to lz4 if enabled5. It can be overwritten using the hibernate.compressor setting to either lzo or lz4.
choice prompt "Default compressor" default HIBERNATION_COMP_LZO depends on HIBERNATION config HIBERNATION_COMP_LZO bool "lzo" depends on CRYPTO_LZO config HIBERNATION_COMP_LZ4 bool "lz4" depends on CRYPTO_LZ4 endchoice config HIBERNATION_DEF_COMP string default "lzo" if HIBERNATION_COMP_LZO default "lz4" if HIBERNATION_COMP_LZ4 help Default compressor to be used for hibernation. static const char * const comp_alg_enabled[] = { #if IS_ENABLED(CONFIG_CRYPTO_LZO) COMPRESSION_ALGO_LZO, #endif #if IS_ENABLED(CONFIG_CRYPTO_LZ4) COMPRESSION_ALGO_LZ4, #endif }; static int hibernate_compressor_param_set(const char *compressor, const struct kernel_param *kp) { unsigned int sleep_flags; int index, ret; sleep_flags = lock_system_sleep(); index = sysfs_match_string(comp_alg_enabled, compressor); if (index >= 0) { ret = param_set_copystring(comp_alg_enabled[index], kp); if (!ret) strscpy(hib_comp_algo, comp_alg_enabled[index], sizeof(hib_comp_algo)); } else { ret = index; } unlock_system_sleep(sleep_flags); if (ret) pr_debug("Cannot set specified compressor %s\n", compressor); return ret; } static const struct kernel_param_ops hibernate_compressor_param_ops = { .set = hibernate_compressor_param_set, .get = param_get_string, }; static struct kparam_string hibernate_compressor_param_string = { .maxlen = sizeof(hibernate_compressor), .string = hibernate_compressor, };We then check whether the requested algorithm is supported via crypto_has_comp. If not, we bail out of the whole operation with EOPNOTSUPP.
As part of crypto_has_comp we perform any needed initialization of the algorithm, loading kernel modules and running initialization code as needed6.
Grab LocksThe next step is to grab the sleep and hibernation locks via lock_system_sleep and hibernate_acquire.
sleep_flags = lock_system_sleep(); /* The snapshot device should not be opened while we're running */ if (!hibernate_acquire()) { error = -EBUSY; goto Unlock; }First, lock_system_sleep marks the current thread as not freezable, which will be important later7. It then grabs the system_transistion_mutex, which locks taking snapshots or modifying how they are taken, resuming from a hibernation image, entering any suspend state, or rebooting.
The GFP MaskThe kernel also issues a warning if the gfp mask is changed via either pm_restore_gfp_mask or pm_restrict_gfp_mask without holding the system_transistion_mutex.
GFP flags tell the kernel how it is permitted to handle a request for memory.
* GFP flags are commonly used throughout Linux to indicate how memory * should be allocated. The GFP acronym stands for get_free_pages(), * the underlying memory allocation function. Not every GFP flag is * supported by every function which may allocate memory.In the case of hibernation specifically we care about the IO and FS flags, which are reclaim operators, ways the system is permitted to attempt to free up memory in order to satisfy a specific request for memory.
* Reclaim modifiers * ----------------- * Please note that all the following flags are only applicable to sleepable * allocations (e.g. %GFP_NOWAIT and %GFP_ATOMIC will ignore them). * * %__GFP_IO can start physical IO. * * %__GFP_FS can call down to the low-level FS. Clearing the flag avoids the * allocator recursing into the filesystem which might already be holding * locks.gfp_allowed_mask sets which flags are permitted to be set at the current time.
As the comment below outlines, preventing these flags from being set avoids situations where the kernel needs to do I/O to allocate memory (e.g. read/writing swap8) but the devices it needs to read/write to/from are not currently available.
/* * The following functions are used by the suspend/hibernate code to temporarily * change gfp_allowed_mask in order to avoid using I/O during memory allocations * while devices are suspended. To avoid races with the suspend/hibernate code, * they should always be called with system_transition_mutex held * (gfp_allowed_mask also should only be modified with system_transition_mutex * held, unless the suspend/hibernate code is guaranteed not to run in parallel * with that modification). */ static gfp_t saved_gfp_mask; void pm_restore_gfp_mask(void) { WARN_ON(!mutex_is_locked(&system_transition_mutex)); if (saved_gfp_mask) { gfp_allowed_mask = saved_gfp_mask; saved_gfp_mask = 0; } } void pm_restrict_gfp_mask(void) { WARN_ON(!mutex_is_locked(&system_transition_mutex)); WARN_ON(saved_gfp_mask); saved_gfp_mask = gfp_allowed_mask; gfp_allowed_mask &= ~(__GFP_IO | __GFP_FS); } Sleep FlagsAfter grabbing the system_transition_mutex the kernel then returns and captures the previous state of the threads flags in sleep_flags. This is used later to remove PF_NOFREEZE if it wasn’t previously set on the current thread.
unsigned int lock_system_sleep(void) { unsigned int flags = current->flags; current->flags |= PF_NOFREEZE; mutex_lock(&system_transition_mutex); return flags; } EXPORT_SYMBOL_GPL(lock_system_sleep); #define PF_NOFREEZE 0x00008000 /* This thread should not be frozen */Then we grab the hibernate-specific semaphore to ensure no one can open a snapshot or resume from it while we perform hibernation. Additionally this lock is used to prevent hibernate_quiet_exec, which is used by the nvdimm driver to active its firmware with all processes and devices frozen, ensuring it is the only thing running at that time9.
bool hibernate_acquire(void) { return atomic_add_unless(&hibernate_atomic, -1, 0); } Prepare ConsoleThe kernel next calls pm_prepare_console. This function only does anything if CONFIG_VT_CONSOLE_SLEEP has been set.
This prepares the virtual terminal for a suspend state, switching away to a console used only for the suspend state if needed.
void pm_prepare_console(void) { if (!pm_vt_switch()) return; orig_fgconsole = vt_move_to_console(SUSPEND_CONSOLE, 1); if (orig_fgconsole < 0) return; orig_kmsg = vt_kmsg_redirect(SUSPEND_CONSOLE); return; }The first thing is to check whether we actually need to switch the VT
/* * There are three cases when a VT switch on suspend/resume are required: * 1) no driver has indicated a requirement one way or another, so preserve * the old behavior * 2) console suspend is disabled, we want to see debug messages across * suspend/resume * 3) any registered driver indicates it needs a VT switch * * If none of these conditions is present, meaning we have at least one driver * that doesn't need the switch, and none that do, we can avoid it to make * resume look a little prettier (and suspend too, but that's usually hidden, * e.g. when closing the lid on a laptop). */ static bool pm_vt_switch(void) { struct pm_vt_switch *entry; bool ret = true; mutex_lock(&vt_switch_mutex); if (list_empty(&pm_vt_switch_list)) goto out; if (!console_suspend_enabled) goto out; list_for_each_entry(entry, &pm_vt_switch_list, head) { if (entry->required) goto out; } ret = false; out: mutex_unlock(&vt_switch_mutex); return ret; }There is an explanation of the conditions under which a switch is performed in the comment above the function, but we’ll also walk through the steps here.
Firstly we grab the vt_switch_mutex to ensure nothing will modify the list while we’re looking at it.
We then examine the pm_vt_switch_list. This list is used to indicate the drivers that require a switch during suspend. They register this requirement, or the lack thereof, via pm_vt_switch_required.
/** * pm_vt_switch_required - indicate VT switch at suspend requirements * @dev: device * @required: if true, caller needs VT switch at suspend/resume time * * The different console drivers may or may not require VT switches across * suspend/resume, depending on how they handle restoring video state and * what may be running. * * Drivers can indicate support for switchless suspend/resume, which can * save time and flicker, by using this routine and passing 'false' as * the argument. If any loaded driver needs VT switching, or the * no_console_suspend argument has been passed on the command line, VT * switches will occur. */ void pm_vt_switch_required(struct device *dev, bool required)Next, we check console_suspend_enabled. This is set to false by the kernel parameter no_console_suspend, but defaults to true.
Finally, if there are any entries in the pm_vt_switch_list, then we check to see if any of them require a VT switch.
Only if none of these conditions apply, then we return false.
If a VT switch is in fact required, then we move first the currently active virtual terminal/console10 (vt_move_to_console) and then the current location of kernel messages (vt_kmsg_redirect) to the SUSPEND_CONSOLE. The SUSPEND_CONSOLE is the last entry in the list of possible consoles, and appears to just be a black hole to throw away messages.
#define SUSPEND_CONSOLE (MAX_NR_CONSOLES-1)Interestingly, these are separate functions because you can use TIOCL_SETKMSGREDIRECT (an ioctl11) to send kernel messages to a specific virtual terminal, but by default its the same as the currently active console.
The locations of the previously active console and the previous kernel messages location are stored in orig_fgconsole and orig_kmsg, to restore the state of the console and kernel messages after the machine wakes up again. Interestingly, this means orig_fgconsole also ends up storing any errors, so has to be checked to ensure it’s not less than zero before we try to do anything with the kernel messages on both suspend and resume.
drivers/tty/vt/vt_ioctl.c:1268
/* Perform a kernel triggered VT switch for suspend/resume */ static int disable_vt_switch; int vt_move_to_console(unsigned int vt, int alloc) { int prev; console_lock(); /* Graphics mode - up to X */ if (disable_vt_switch) { console_unlock(); return 0; } prev = fg_console; if (alloc && vc_allocate(vt)) { /* we can't have a free VC for now. Too bad, * we don't want to mess the screen for now. */ console_unlock(); return -ENOSPC; } if (set_console(vt)) { /* * We're unable to switch to the SUSPEND_CONSOLE. * Let the calling function know so it can decide * what to do. */ console_unlock(); return -EIO; } console_unlock(); if (vt_waitactive(vt + 1)) { pr_debug("Suspend: Can't switch VCs."); return -EINTR; } return prev; }Unlike most other locking functions we’ve seen so far, console_lock needs to be careful to ensure nothing else is panicking and needs to dump to the console before grabbing the semaphore for the console and setting a couple flags.
PanicsPanics are tracked via an atomic integer set to the id of the processor currently panicking.
/** * console_lock - block the console subsystem from printing * * Acquires a lock which guarantees that no consoles will * be in or enter their write() callback. * * Can sleep, returns nothing. */ void console_lock(void) { might_sleep(); /* On panic, the console_lock must be left to the panic cpu. */ while (other_cpu_in_panic()) msleep(1000); down_console_sem(); console_locked = 1; console_may_schedule = 1; } EXPORT_SYMBOL(console_lock); /* * Return true if a panic is in progress on a remote CPU. * * On true, the local CPU should immediately release any printing resources * that may be needed by the panic CPU. */ bool other_cpu_in_panic(void) { return (panic_in_progress() && !this_cpu_in_panic()); } static bool panic_in_progress(void) { return unlikely(atomic_read(&panic_cpu) != PANIC_CPU_INVALID); } /* Return true if a panic is in progress on the current CPU. */ bool this_cpu_in_panic(void) { /* * We can use raw_smp_processor_id() here because it is impossible for * the task to be migrated to the panic_cpu, or away from it. If * panic_cpu has already been set, and we're not currently executing on * that CPU, then we never will be. */ return unlikely(atomic_read(&panic_cpu) == raw_smp_processor_id()); }console_locked is a debug value, used to indicate that the lock should be held, and our first indication that this whole virtual terminal system is more complex than might initially be expected.
/* * This is used for debugging the mess that is the VT code by * keeping track if we have the console semaphore held. It's * definitely not the perfect debug tool (we don't know if _WE_ * hold it and are racing, but it helps tracking those weird code * paths in the console code where we end up in places I want * locked without the console semaphore held). */ static int console_locked;console_may_schedule is used to see if we are permitted to sleep and schedule other work while we hold this lock. As we’ll see later, the virtual terminal subsystem is not re-entrant, so there’s all sorts of hacks in here to ensure we don’t leave important code sections that can’t be safely resumed.
Disable VT SwitchAs the comment below lays out, when another program is handling graphical display anyway, there’s no need to do any of this, so the kernel provides a switch to turn the whole thing off. Interestingly, this appears to only be used by three drivers, so the specific hardware support required must not be particularly common.
drivers/gpu/drm/omapdrm/dss drivers/video/fbdev/geode drivers/video/fbdev/omap2drivers/tty/vt/vt_ioctl.c:1308
/* * Normally during a suspend, we allocate a new console and switch to it. * When we resume, we switch back to the original console. This switch * can be slow, so on systems where the framebuffer can handle restoration * of video registers anyways, there's little point in doing the console * switch. This function allows you to disable it by passing it '0'. */ void pm_set_vt_switch(int do_switch) { console_lock(); disable_vt_switch = !do_switch; console_unlock(); } EXPORT_SYMBOL(pm_set_vt_switch);The rest of the vt_switch_console function is pretty normal, however, simply allocating space if needed to create the requested virtual terminal and then setting the current virtual terminal via set_console.
Virtual Terminal Set ConsoleWith set_console, we begin (as if we haven’t been already) to enter the madness that is the virtual terminal subsystem. As mentioned previously, modifications to its state must be made very carefully, as other stuff happening at the same time could create complete messes.
All this to say, calling set_console does not actually perform any work to change the state of the current console. Instead it indicates what changes it wants and then schedules that work.
int set_console(int nr) { struct vc_data *vc = vc_cons[fg_console].d; if (!vc_cons_allocated(nr) || vt_dont_switch || (vc->vt_mode.mode == VT_AUTO && vc->vc_mode == KD_GRAPHICS)) { /* * Console switch will fail in console_callback() or * change_console() so there is no point scheduling * the callback * * Existing set_console() users don't check the return * value so this shouldn't break anything */ return -EINVAL; } want_console = nr; schedule_console_callback(); return 0; }The check for vc->vc_mode == KD_GRAPHICS is where most end-user graphical desktops will bail out of this change, as they’re in graphics mode and don’t need to switch away to the suspend console.
vt_dont_switch is a flag used by the ioctls11 VT_LOCKSWITCH and VT_UNLOCKSWITCH to prevent the system from switching virtual terminal devices when the user has explicitly locked it.
VT_AUTO is a flag indicating that automatic virtual terminal switching is enabled12, and thus deliberate switching to a suspend terminal is not required.
However, if you do run your machine from a virtual terminal, then we indicate to the system that we want to change to the requested virtual terminal via the want_console variable and schedule a callback via schedule_console_callback.
void schedule_console_callback(void) { schedule_work(&console_work); }console_work is a workqueue2 that will execute the given task asynchronously.
Console Callback /* * This is the console switching callback. * * Doing console switching in a process context allows * us to do the switches asynchronously (needed when we want * to switch due to a keyboard interrupt). Synchronization * with other console code and prevention of re-entrancy is * ensured with console_lock. */ static void console_callback(struct work_struct *ignored) { console_lock(); if (want_console >= 0) { if (want_console != fg_console && vc_cons_allocated(want_console)) { hide_cursor(vc_cons[fg_console].d); change_console(vc_cons[want_console].d); /* we only changed when the console had already been allocated - a new console is not created in an interrupt routine */ } want_console = -1; } ...console_callback first looks to see if there is a console change wanted via want_console and then changes to it if it’s not the current console and has been allocated already. We do first remove any cursor state with hide_cursor.
static void hide_cursor(struct vc_data *vc) { if (vc_is_sel(vc)) clear_selection(); vc->vc_sw->con_cursor(vc, false); hide_softcursor(vc); }A full dive into the tty driver is a task for another time, but this should give a general sense of how this system interacts with hibernation.
Notify Power Management Call Chain pm_notifier_call_chain_robust(PM_HIBERNATION_PREPARE, PM_POST_HIBERNATION)This will call a chain of power management callbacks, passing first PM_HIBERNATION_PREPARE and then PM_POST_HIBERNATION on startup or on error with another callback.
int pm_notifier_call_chain_robust(unsigned long val_up, unsigned long val_down) { int ret; ret = blocking_notifier_call_chain_robust(&pm_chain_head, val_up, val_down, NULL); return notifier_to_errno(ret); }The power management notifier is a blocking notifier chain, which means it has the following properties.
* Blocking notifier chains: Chain callbacks run in process context. * Callouts are allowed to block.The callback chain is a linked list with each entry containing a priority and a function to call. The function technically takes in a data value, but it is always NULL for the power management chain.
struct notifier_block; typedef int (*notifier_fn_t)(struct notifier_block *nb, unsigned long action, void *data); struct notifier_block { notifier_fn_t notifier_call; struct notifier_block __rcu *next; int priority; };The head of the linked list is protected by a read-write semaphore.
struct blocking_notifier_head { struct rw_semaphore rwsem; struct notifier_block __rcu *head; };Because it is prioritized, appending to the list requires walking it until an item with lower13 priority is found to insert the current item before.
/* * Blocking notifier chain routines. All access to the chain is * synchronized by an rwsem. */ static int __blocking_notifier_chain_register(struct blocking_notifier_head *nh, struct notifier_block *n, bool unique_priority) { int ret; /* * This code gets used during boot-up, when task switching is * not yet working and interrupts must remain disabled. At * such times we must not call down_write(). */ if (unlikely(system_state == SYSTEM_BOOTING)) return notifier_chain_register(&nh->head, n, unique_priority); down_write(&nh->rwsem); ret = notifier_chain_register(&nh->head, n, unique_priority); up_write(&nh->rwsem); return ret; } /* * Notifier chain core routines. The exported routines below * are layered on top of these, with appropriate locking added. */ static int notifier_chain_register(struct notifier_block **nl, struct notifier_block *n, bool unique_priority) { while ((*nl) != NULL) { if (unlikely((*nl) == n)) { WARN(1, "notifier callback %ps already registered", n->notifier_call); return -EEXIST; } if (n->priority > (*nl)->priority) break; if (n->priority == (*nl)->priority && unique_priority) return -EBUSY; nl = &((*nl)->next); } n->next = *nl; rcu_assign_pointer(*nl, n); trace_notifier_register((void *)n->notifier_call); return 0; }Each callback can return one of a series of options.
#define NOTIFY_DONE 0x0000 /* Don't care */ #define NOTIFY_OK 0x0001 /* Suits me */ #define NOTIFY_STOP_MASK 0x8000 /* Don't call further */ #define NOTIFY_BAD (NOTIFY_STOP_MASK|0x0002) /* Bad/Veto action */When notifying the chain, if a function returns STOP or BAD then the previous parts of the chain are called again with PM_POST_HIBERNATION14 and an error is returned.
/** * notifier_call_chain_robust - Inform the registered notifiers about an event * and rollback on error. * @nl: Pointer to head of the blocking notifier chain * @val_up: Value passed unmodified to the notifier function * @val_down: Value passed unmodified to the notifier function when recovering * from an error on @val_up * @v: Pointer passed unmodified to the notifier function * * NOTE: It is important the @nl chain doesn't change between the two * invocations of notifier_call_chain() such that we visit the * exact same notifier callbacks; this rules out any RCU usage. * * Return: the return value of the @val_up call. */ static int notifier_call_chain_robust(struct notifier_block **nl, unsigned long val_up, unsigned long val_down, void *v) { int ret, nr = 0; ret = notifier_call_chain(nl, val_up, v, -1, &nr); if (ret & NOTIFY_STOP_MASK) notifier_call_chain(nl, val_down, v, nr-1, NULL); return ret; }Each of these callbacks tends to be quite driver-specific, so we’ll cease discussion of this here.
Sync FilesystemsThe next step is to ensure all filesystems have been synchronized to disk.
This is performed via a simple helper function that times how long the full synchronize operation, ksys_sync takes.
void ksys_sync_helper(void) { ktime_t start; long elapsed_msecs; start = ktime_get(); ksys_sync(); elapsed_msecs = ktime_to_ms(ktime_sub(ktime_get(), start)); pr_info("Filesystems sync: %ld.%03ld seconds\n", elapsed_msecs / MSEC_PER_SEC, elapsed_msecs % MSEC_PER_SEC); } EXPORT_SYMBOL_GPL(ksys_sync_helper);ksys_sync wakes and instructs a set of flusher threads to write out every filesystem, first their inodes15, then the full filesystem, and then finally all block devices, to ensure all pages are written out to disk.
/* * Sync everything. We start by waking flusher threads so that most of * writeback runs on all devices in parallel. Then we sync all inodes reliably * which effectively also waits for all flusher threads to finish doing * writeback. At this point all data is on disk so metadata should be stable * and we tell filesystems to sync their metadata via ->sync_fs() calls. * Finally, we writeout all block devices because some filesystems (e.g. ext2) * just write metadata (such as inodes or bitmaps) to block device page cache * and do not sync it on their own in ->sync_fs(). */ void ksys_sync(void) { int nowait = 0, wait = 1; wakeup_flusher_threads(WB_REASON_SYNC); iterate_supers(sync_inodes_one_sb, NULL); iterate_supers(sync_fs_one_sb, &nowait); iterate_supers(sync_fs_one_sb, &wait); sync_bdevs(false); sync_bdevs(true); if (unlikely(laptop_mode)) laptop_sync_completion(); }It follows an interesting pattern of using iterate_supers to run both sync_inodes_one_sb and then sync_fs_one_sb on each known filesystem16. It also calls both sync_fs_one_sb and sync_bdevs twice, first without waiting for any operations to complete and then again waiting for completion17.
When laptop_mode is enabled the system runs additional filesystem synchronization operations after the specified delay without any writes.
/* * Flag that puts the machine in "laptop mode". Doubles as a timeout in jiffies: * a full sync is triggered after this time elapses without any disk activity. */ int laptop_mode; EXPORT_SYMBOL(laptop_mode);However, when running a filesystem synchronization operation, the system will add an additional timer to schedule more writes after the laptop_mode delay. We don’t want the state of the system to change at all while performing hibernation, so we cancel those timers.
/* * We're in laptop mode and we've just synced. The sync's writes will have * caused another writeback to be scheduled by laptop_io_completion. * Nothing needs to be written back anymore, so we unschedule the writeback. */ void laptop_sync_completion(void) { struct backing_dev_info *bdi; rcu_read_lock(); list_for_each_entry_rcu(bdi, &bdi_list, bdi_list) del_timer(&bdi->laptop_mode_wb_timer); rcu_read_unlock(); }As a side note, the ksys_sync function is simply called when the system call sync is used.
SYSCALL_DEFINE0(sync) { ksys_sync(); return 0; } The End of PreparationWith that the system has finished preparations for hibernation. This is a somewhat arbitrary cutoff, but next the system will begin a full freeze of userspace to then dump memory out to an image and finally to perform hibernation. All this will be covered in future articles!
-
Hibernation modes are outside of scope for this article, see the previous article for a high-level description of the different types of hibernation. ↩
-
Workqueues are a mechanism for running asynchronous tasks. A full description of them is a task for another time, but the kernel documentation on them is available here: https://www.kernel.org/doc/html/v6.9/core-api/workqueue.html ↩ ↩2
-
This is a bit of an oversimplification, but since this isn’t the main focus of this article this description has been kept to a higher level. ↩
-
Kconfig is Linux’s build configuration system that sets many different macros to enable/disable various features. ↩
-
Kconfig defaults to the first default found ↩
-
Including checking whether the algorithm is larval? Which appears to indicate that it requires additional setup, but is an interesting choice of name for such a state. ↩
-
Specifically when we get to process freezing, which we’ll get to in the next article in this series. ↩
-
Swap space is outside the scope of this article, but in short it is a buffer on disk that the kernel uses to store memory not current in use to free up space for other things. See Swap Management for more details. ↩
-
The code for this is lengthy and tangential, thus it has not been included here. If you’re curious about the details of this, see kernel/power/hibernate.c:858 for the details of hibernate_quiet_exec, and drivers/nvdimm/core.c:451 for how it is used in nvdimm. ↩
-
Annoyingly this code appears to use the terms “console” and “virtual terminal” interchangeably. ↩
-
ioctls are special device-specific I/O operations that permit performing actions outside of the standard file interactions of read/write/seek/etc. ↩ ↩2
-
I’m not entirely clear on how this flag works, this subsystem is particularly complex. ↩
-
In this case a higher number is higher priority. ↩
-
Or whatever the caller passes as val_down, but in this case we’re specifically looking at how this is used in hibernation. ↩
-
An inode refers to a particular file or directory within the filesystem. See Wikipedia for more details. ↩
-
Each active filesystem is registed with the kernel through a structure known as a superblock, which contains references to all the inodes contained within the filesystem, as well as function pointers to perform the various required operations, like sync. ↩
-
I’m including minimal code in this section, as I’m not looking to deep dive into the filesystem code at this time. ↩
Sergio Durigan Junior: Chatting in the 21st century
Several people have been asking me to explain and/or write about my solution for chatting nowadays. I realize that the current scenario is much more complex than, say, 10 or 20 years ago. Back then, this post would probably be more about the IRC client I used than about different chatting technologies.
I have also spent a non trivial amount of time setting things up the way I want, so I understand that it’s about time to write about my setup not only because I think it can be helpful to others, but also because I would like to document things for myself.
The backbone: MatrixI chose to use Matrix as the place where I integrate everything. Despite there being some heavy (and justified) criticism on the protocol itself, it serves me well for what I need right now. Obviously, I don’t like the fact that I have to provide Matrix and all of its accompanying bridges a VPS with 4GB of RAM and 3 vCPUs, but I think that that ship has sailed, unfortunately.
In an ideal world, I would be using XMPP and dedicating only a fraction of the resources I’m using today to have a full chat system. And since I have been running my personal XMPP server for more than a decade now, I did try to find a solution that would allow me to keep using it, but unfortunately the protocol became almost a hobbyist thing, so there’s that.
A few disclaimersI self-host everything, including my Matrix server. Much of what I did won’t work if you don’t self-host Matrix, so keep that in mind.
This won’t be a post teaching you how to deploy the services. My intention is to describe what I use and for what purpose.
Also, as much as I try to use Debian packages for everything I do, I opted to deploy all services using a community-maintained Ansible playbook which is very well written and organized: matrix-docker-ansible-deploy.
Last but not least, as I said above, you will likely need a machine with a good amount of RAM, CPU and storage, especially if you deploy Synapse as your Matrix homeserver (which is what I recommend if you plan to use the bridges I’ll mention). My current VPS has 4GB of RAM, 3 vCPUs and 80GB of storage (of which I’m currently using approximately 55GB).
Problem #1: my Matrix client(s)There are a lot of clients that can talk the Matrix protocol, but most of them are either web clients or GUI programs. I live on the terminal, more specifically inside Emacs, so I settled for the amazing ement.el Emacs mode. It works surprisingly well, but unfortunately doesn’t support end-to-end encryption out of the box; for that, you have to hook it up with pantalaimon. Unfortunately, the project seems abandoned and therefore I don’t recommend you to use it. I don’t use it myself.
When I have to reply some E2E encrypted message from another user, I go to my web browser and use my self-hosted Element client. It’s a nuisance, but one that I’m willing to accept because of security concerns.
If you’re into web clients and don’t want to use Element (because it is heavy), you can try Cinny. It’s lightweight and supports a decent set of features.
If you’re a terminal lover but don’t use Emacs, you may want to try gomuks or iamb.
Problem #2: IRC bridgingThere are basically two types of IRC bridges for Matrix:
-
The regular and most used matrix-appservice-irc. This bridge takes Matrix to IRC (think of IRC users with the [m] suffix appended to their nicknames), and is what the matrix.org and other big homeservers (including matrix.debian.social) use. It’s a complex service which allows thousands of Matrix users to connect to IRC networks, but that unfortunately has complex problems and is only worth using if you intend to host a community server.
-
A bouncer-like bridge called Heisenbridge. This is what I use personally. It takes IRC to Matrix, which means that people on IRC will not know that you’re using Matrix. This bridge is much simpler, and because it acts like a bouncer it’s pretty much impossible for it to cause problems with the IRC network.
Due to the fact that I sometimes like to use other IRC clients, I still run a regular ZNC bouncer, and I use Heisenbridge to connect to my ZNC. This means that I can use, e.g., ERC inside Emacs and my Matrix bridge at the same time. But you don’t necessarily need to run another bouncer; you can simply use Heisenbridge and connect directly to the IRC network(s) you want.
A word of caution, though: unlike ZNC, Heisenbridge doesn’t support per-user configuration when you use it in bouncer mode. This is the reason why you need to self-host it, and why it’s not possible to offer the service to other users (they would have access to your IRC network configuration otherwise).
It’s also worth talking about logs. I find that keeping logs of everything that goes on IRC has saved me a bunch of times, and so I find it really important to continue doing that. Unfortunately, neither ement.el nor Element support logging things out of the box (at least not that I know). This is also one of the reasons why I still keep my ZNC around: I configure it to log everything.
Problem #3: TelegramI don’t use Telegram myself, but unfortunately several people from the Debian community do, especially in Brazil. There is a whole Debian community on Telegram, and I wanted to be able to bridge our Debian Matrix channels to their Telegram counterparts.
I am currently using mautrix-telegram for that, and it’s working great. You need someone with a Telegram account to configure their credentials so that the bridge can connect to it, but afterwards it’s really easy to bridge channels together.
Problem #4: GitLab webhooksSomething else I wanted to be able to do was to receive notifications regarding new issues, merge requests and other activities from Salsa. For this, I’m using maubot, which is awesome and has a huge list of plugins. I’m using the gitlab one.
Final thoughtsOverall, I’m satisfied with the setup I have now. It has certainly taken some time and effort to find the right tool for each problem I needed to solve, and I still feel like there are some rough edges to soften (like the fact that my Emacs client doesn’t support E2E encryption out of the box, or the whole logging situation), but otherwise things are working fine and I haven’t had any big problems with the deployment. You do have to be much more careful about stuff (for example, when I installed an unrelated service that “hijacked” my Apache configuration and made Matrix’s federation silently stop working), though.
If you have more specific questions about any part of my setup, shoot me an email and I’ll do my best to help.
Happy chatting!
This week in Plasma: Stabilization for 6.2
This week I and many other major Plasma contributors are are at Akademy, planning the future and having many fruitful in-person discussions! As a result, probably next week’s post will be a bit light. This week though, lots of pre-Akademy changes got merged, most of them bug-fixes and performance improvements scheduled for Plasma 6.2. We want 6.2 to be super duper stable, and are putting in the work to ensure this goal is reached!
In addition, we merged a few final late-breaking features that had been under development for months and were deemed stable enough — likely the last ones before the hard feature freeze in a few days. Check it out!
Late-Breaking New FeaturesYou can now rename audio devices! Additionally, you can now choose the technical data source used to generate default names for audio devices that you don’t choose to manually rename, which helps for hardware like mixer tables which show up as like 50 devices such that renaming each one individually would be a big pain in the butt (Harald Sitter, Plasma 6.2.0. Link)
You can now click/double-click on .ovpn VPN profile files to configure a new VPN (Nicolas Fella, Plasma 6.2.0. Link)
You can now place files in ~/Templates and they will appear as templates in the “Create New…” menu that appears in various places, including Plasma’s Desktop and Dolphin (Antti Savolainen, Frameworks 6.7. Link)
Notable UI ImprovementsWhen copying image data to the clipboard, the Clipboard widget now always shows a preview of the image, instead of sometimes, in a random-seeming manner, showing a symbolic icon instead (Noah Davis, Plasma 6.2.0. Link)
In Discover’s rating preview carousel thingy that provides an overview of an app’s rating including top reviews, it will no longer show reviews that have been voted down more than up (Aleix Pol Gonzales, Plasma 6.2.0. Link)
In Plasma’s Networks widget, the button to create a Wi-Fi hotspot now uses the correct icon (Darshan Phaldesai, Plasma 6.2.0. Link)
Notable Bug FixesFixed an issue that could cause pop-ups for widgets on a Plasma panel to be resized to either their original size or else a much smaller size after the screen configuration changed (Xaver Hugl, Plasma 6.1.5. Link)
Searching for locations with umlauts in their names now works as expected in Plasma’s Weather Report widget (Ismael Asensio, Plasma 6.1.5. Link)
When using the “Toggle Touchpad” global shortcut to turn your touchpad on or off, if you restart the machine with the touchpad disabled, then the next time you start it up again, the state will be correctly reported such that you can press the shortcut only once to turn the touchpad on again (Akseli Lahtinen, Plasma 6.1.5. Link)
System Settings no longer crashes every time you close the “Login Screen (SDDM)” page while on its Behavior sub-page (Nicolas Fella, Plasma 6.1.5. Link)
Fixed two somewhat common ways that Plasma could crash with certain multi-screen setups on X11 (Méven Car, Plasma 6.2.0. Link 1 and link 2)
Fixed a case where Plasma could crash when you drag a widget from the Widget Explorer over an Activity Manager widget (David Redondo, Plasma 6.2.0. Link)
Moving the pointer over tasks in Plasma’s Task Manager widget no longer causes their thumbnail previews to immediately disappear some of the time, depending on which direction you moved it in and your panel’s position on the screen (David Redondo, Plasma 6.2.0. Link)
Clearing the search field in Plasma’s Kickoff Application Launcher widget no longer unexpectedly launches the top item shown in the last search (David Edmundson, Plasma 6.2.0. Link)
The “Charging Rate” sensor in the System Monitor app and its widgets of no longer shows a negative number while the battery is in fact charging — only while it’s discharging (Arjen Hiemstra, Plasma 6.2.0. Link)
Fixed a visual glitch in System Settings’ Region and Language page that caused the selected item on the Binary Dialect sub-page to have unreadable text when not using a custom accent color (Méven Car, Plasma 6.2.0. Link)
Fixed a bug that caused animated cursors to only play their animation while the cursor was being moved when the system was falling back to or forced into using software cursors (Vlad Zahorodnii, Plasma 6.2.0. Link)
Implemented a workaround for the issue that causes the Touchpad and other pages in System Settings to sometimes break when being navigated to after first accessing another page. The root cause is still under investigation, since it seems to be very tricky and complicated (Albert Astals Cid, Frameworks 6.6. Link)
Sharing a file to your device via KDE Connect no longer breaks after the first time you do it until the app you shared the file from is restarted (Nicolas Fella, Frameworks 6.6. Link)
Fixed an issue that would make impossible to use the “Restore” functionality for trashed files or folders moved by an app to the trash using absolute file paths (Nicolas Fella, Frameworks 6.6. Link)
When Discover is maximized, it now remembers the window size it was displayed at before, so when you un-maximize it, it returns to that size (Eamonn Rea and Joshua Goins, Plasma 6.2.0 with Frameworks 6.7. Link 1 and link 2)
Other bug information of note:
- 1 Very high priority Plasma bug (down from 2 as last week). Current list of bugs
- 32 15-minute Plasma bugs (down from 33 last week). Current list of bugs
- 115 KDE bugs of all kinds fixed over the last week. Full list of bugs
Fixed an issue in Discover that could, under certain circumstances, cause the app to freeze right after being launched (Harald Sitter, Plasma 6.2.0. Link)
Optimized search performance in Discover so that it does less unnecessary work (Aleix Pol Gonzalez, Plasma 6.2.0. Link)
Did some performance optimization for KFilePlacesItem which should improve startup speed for anything using the Places panel (Kai Uwe Broulik, Frameworks 6.7. Link)
…And Everything ElseThis blog only covers the tip of the iceberg! If you’re hungry for more, check out https://planet.kde.org, where you can find more news from other KDE contributors.
How You Can HelpSo yeah, like I said, please test Plasma from current git master and open bug reports about issues you find. Another path is to help triage bug reports that the first crowd will be opening. Ask for more information, make them actionable, move them where needed! And of course, help fix triaged and confirmed bug reports.
Otherwise, visit https://community.kde.org/Get_Involved to discover other ways to be part of a project that really matters. Each contributor makes a huge difference in KDE; you are not a number or a cog in a machine! You don’t have to already be a programmer, either. I wasn’t when I got started. Try it, you’ll like it! We don’t bite! Or consider donating instead! That helps too.
Mario Hernandez: Integrating Drupal with Storybook components
Hey you're back! 🙂 In the previous post we talked about how to build a custom Drupal theme using Storybook as the design system. We also built a simple component to demonstrate how Storybook, using custom extensions, can understand Twig. In this post, the focus will be on making Drupal aware of those components by connecting Drupal to Storybook.
If you are following along, we will continue where we left off to take advantage of all the prep work we did in the previous post. Topics we will cover in this post include:
- What is Drupal integration
- Installing and preparing Drupal for integration
- Building components in Storybook
- Building a basic front-end workflow
- Integrating Drupal with Storybook components
In the context of Drupal development using the component-driven methodology, Drupal integration means connecting Drupal presenter templates such as node.html.twig, block.html.twig, paragraph.html.twig, etc. to Storybook by mapping Drupal fields to component fields in Storybook. This in turn allows for your Drupal content to be rendered wrapped in the Storybook components.
The advantage of using a design system like Storybook is that you are in full control of the markup when building components, as a result your website is more semantic, accessible, and easier to maintain.
Building more components in StorybookThe title component we built in the previous post may not be enough to demonstrate some of the advanced techniques when integrating components. We will build a larger component to put these techniques in practice. The component we will build is called Card and it looks like this:
When building components, I like to take inventory of the different parts that make up the components I'm building. The card image above shows three parts: An image, a title, and teaser text. Each of these parts translates into fields when I am defining the data structure for the component or building the entity in Drupal.
Building the Card component- Open the Drupal site in your code editor and within your code editor navigate to the storybook theme (web/themes/custom/storybook)
- Create two new directories inside components called 01-atoms and 02-molecules
- Inside 02-molecules create a new directory called card
- Inside the card directory add the following four files:
- card.css: component's styles
- card.twig: component's markup and logic
- card.stories.jsx: Storybook's story
- card.yml: component's demo data
- Add the following code snippet to card.yml:
- Add the following to card.twig to provide the markup and logic for the card:
Code snippet for building card
-
Copy and paste these styles into card.css.
-
Finally, let's create the Storybook card story by adding the following to card.stories.jsx:
Let's go over a few things regarding the code above:
- The data structure in card.yml reflects the data structure and type we will use in Drupal.
- The image field uses the entire <img> element rather than just using the image src and alt attributes. The reason for this is so when we get to Drupal, we can use Drupal's full image entity. This is a good practice for caching purposes.
- card.twig reuses the title component we created in the previous post. Rather than build a title from scratch for the Card and repeat the code we already wrote, reusing the existing components keeps us DRY.
- card.stories.jsx in the Storybook story for the Card, notice how the code in this file is very similar to the code in the title.stories.jsx. Even with complex components, when we port them into Storybook as stories, most times the code will be similar as what you see above because Storybook is simply parsing whatever is in .twig and .yml files. There are exceptions when the React code may have extra parameters or logic which typically happens when we're building stories variations. Maybe a topic for a different blog post. 😉
You may have noticed in card.twig we used the namespace @atoms when nesting the title component. This namespace does not exist, and we need to create it now. In addition, we need to move the title component into the 01-atoms directory:
- In your code editor or command line (whichever is easier), move the title directory into the 01-atoms directory
- In your editor, open title.stories.jsx and change the line
title: 'Components/Title' to title: 'Atoms/Title'. This will display the title component within the Atoms category in Storybook's sidebar. - Rather than have you make individual changes to vite.config.js, let's replace/overwrite all its content with the following:
Let's go over some of the most noticeable updates inside vite.config.js:
-
We have defined a few things to improve the functionality of our Vite project, starting with using src as our app root directory and public for publicDir. This helps the app understand the project structure in a relative manner.
-
Next, we defined a Build task which provides the app with defaults for things like where should it compiled code to (i.e. /dist), and rollupOptions for instructing the app which stylesheets to compile and what to call them.
-
As part of the rollupOptions we also defined two stylesheets for global styles (reset.css and styles.css). We'll create these next.
Important This is as basic as it gets for a build workflow and in no way would I recommend this be your front-end build workflow. When working on bigger projects with more components, it is best to define a more robust and dynamic workflow that provides automation for all the repetitive tasks performed on a typical front-end project. -
Under the Plugins section, we have defined two new namespaces, @atoms and @molecules, each of which points to specific path within our components directory. These are the namespaces Storybook understands when nesting components. You can have as many namespaces as needed.
- Inside storybook/src, create a new directory called css
- Inside the css directory, add two new files, reset.css and styles.css
- Here are the styles for reset.css and styles.css. Please copy them and paste them into each of the stylesheets.
- Now for Storybook to use reset.css and styles.css, we need to update /.storybook/preview.js by adding these two imports directly after the current imports, around line 4.
- In your command line, navigate to the storybook directory and run:
A quick note about the commands above:
- nvm install and npm install are typically only done once in your app. These commands will first install and use the node version specified in .nvmrc, and will install all the required node packages found in package.json. If you happen to be workign on another project that may use a different version of node, when you comeback to the Storybook project you will need to run nvm use in order to resume using the right node version.
- npm run build is usually only ran when you have made configuration changes to the project or are introducing new files.
- npm run storybook is the command you will use all the time when you want to run Storybook.
After Storybook launches, you should see two story categories in Storybook's sidebar, Atoms and Molecules. The title component should be under Atoms and the Card under Molecules. See below:
Installing Drupal and setting up the Storybook themeWe have completed all the prep work in Storybook and our attention now will be all in Drupal. In the previous post all the work we did was in a standalone project which did not require Drupal to run. In this post, we need a Drupal site to be able to do the integration with Storybook. If you are following along and already have a Drupal 10 site ready, you can skip the first step below.
- Build a basic Drupal 10 website (I recommend using DDEV).
- Add the storybook theme to your website. If you completed the excercise in the previous post, you can copy the theme you built into your site's /themes/custom/ directory, Otherwise, you can clone the previous post repo into the same location so it becomes your theme. After this your theme's path should be themes/custom/storybook.
- No need to enable the theme just yet, we'll come back to the theme shortly.
- Finally, create a new Article post that includes a title, body content and an image. We'll use this article later in the process.
Earlier we created namespaces for Storybook, now we will do the same but this time for Drupal. It is best if the namesapces' names between Storybook and Drupal match for consistency. In addition, we will create Drupal libraries to allow Drupal to use the CSS we've written.
- Install and enable the Components module
- Add the following namespaces at the end of storybook.info.yml (mind your indentation):
- Replace all content in storybook.libraries.yml with the following:
-
Let's go over the changes to both, storybook.info.yml and storybook.libraries.yml files:
- Using the Components module we created two namespaces: @atoms and @molecules. Each namespace is associated with a specific path to the corresponding components. This is important because Drupal by default only looks for Twig templates inside the /templates directory and without the Components module and the namespaces it would not know to look for our component's Twig templates inside the components directory.
- Then we created two Drupal libraries: global and card. The Global library includes two CSS stylesheets (reset.css and styles.css), which handle base styles in our theme. the Card library includes the styles we wrote for the Card component. If you noticed, when we created the Card component, the first line inside card.twig is a Twig attach library statement. Basically card.twig is expecting a Drupal library called card.
All the pieces are in place to Integrate the Card component so Drupal can use it to render article nodes when viewed in teaser view mode.
-
The first thing we need to do to begin the integration process is to determine which Twig template Drupal uses to render article nodes in teaser view mode. One easy way to do this is by turning Twig debugging on. This used to be a complex configuration but starting with Drupal 10.1 you can now do it directly in Drupal's UI:
- While logged in with admin access, navigate to /admin/config/development/settings on your browser. This will bring up the Development settings page.
- Check all the boxes on this page and click Save settings. This will enable Twig debugging and disable caching.
- Now navigate to /admin/config/development/performance so we can turn CSS and JS aggregation off.
- Under Bandwidth optimization cleared the two boxes for CSS and Javascript aggregation then click on Save configuration.
- Lastly, click the Clear all caches button. This will ensure any CSS or JS we write will be available without having to clear caches.
-
With Twig debugging on, go to the homepage where the Article we created should be displayed in teaser mode. If you right-click on any part of the article and select inspect from the context menu, you will see in detail all the templates Drupal is using to render the content on the current page. See example below.
Note I am using a new basic Drupal site with Olivero as the default theme. If your homepage does not display Article nodes in teaser view mode, you could create a simple Drupal view to list Article nodes in teaser view mode to follow along.
In the example above, we see a list of templates that start with node...*. These are called template suggestions and are the names Drupal is suggesting we can assign our custom templates. The higher the template appears on the list, the more specific it is to the piece of content being rendered. For example, changes made to node.html.twig would affect ALL nodes throughout the site, whereas changes made to node--1--teaser.html.twig will only affect the first node created on the site but only when it's viewed in teaser view mode.
Notice I marked the template name Drupal is using to render the Article node. We know this is the template because it has an X before the template name.
In addition, I also marked the template path. As you can see the current template is located in core/themes/olivero/templates/content/node--teaser.html.twig.
And finally, I marked examples of attributes Drupal is injecting in the markup. These attributes may not always be useful but it is a good practice to ensure they are available even when we are writing custom markup for our components.
Create a template suggestionBy looking at the path of the template in the code inspector, we can see that the original template being used is located inside the Olivero core theme. The debugging screenshot above shows a pretty extensive list of templates suggestions, and based on our requirements, copying the file node--teaser.html.twig makes sense since we are going to be working with a node in teaser view mode.
- Copy /core/themes/olivero/templates/content/node--teaser.html.twig into your theme's /storybook/templates/content/. Create the directory if it does not exist.
- Now rename the newly copied template to node--article--teaser.html.twig.
- Clear Drupal's cache since we are introducing a new Twig template.
As you can see, by renaming the template node--article--teaser (one of the names listed as a suggestion), we are indicating that any changes we make to this template will only affect nodes of type Article which are displayed in Teaser view mode. So whenever an Article node is displayed, if it is in teaser view mode, it will use the Card component to render it.
The template has a lot of information that may or may not be needed when integrating it with Storybook. If you recall, the Card component we built was made up of three parts: an image, a title, and teaser text. Each of those are Drupal fields and these are the only fields we care about when integrating. Whenever when I copy a template from Drupal core or a module into my theme, I like to keep the comments on the template untouched. This is helpful in case I need to reference any variables or elements of the template.
The actual integration ...Finally- Delete everything from the newly copied template except the comments and the classes array variable
- At the bottom of what is left in the template add the following code snippet:
- We set a variable with content|render as its value. The only purpose for this variable is to make Drupal aware of the entire content array for caching purposes. More info here.
- Next, we setup a variable called article_title which we structured the same way as data inside card.yml. Having similar data structures between Drupal and our components provides many advantages during the integration process.
- Notice how for the text and url properties we are using Drupal specific variables (label and url), accordingly. If you look in the comments in node--article--teaser.html.twig you will see these two variables.
- We are using a Twig include statement with the @molecules namespace to nest the Card component into the node template. The same way we nested the Title component into the Card.
- We mapped Drupal's attributes into the component's attributes placeholder so Drupal can inject any attributes such as CSS classes, IDs, Data attributes, etc. into the component.
- Finally, we mapped the image, title and teaser fields from Drupal to the component's equivalent fields.
- Save the changes to the template and clear Drupal's cache.
Before we forget, let's enable the Storybook theme an also make it your default theme, otherwise all the work we are doing will not be visible since we are currently using Olivero as the default theme. Clear caches after this is done.
Previewing the Article node as a CardIntegration is done and we switched our default theme to Storybook. After clearing caches if you reload the homepage you should be able to see the Article node you wrote but this time displayed as a card. See below:
- If you right-click on the article and select Inspect, you will notice the following:
- Drupal is now using node--article--teaser.html.twig. This is the template we created.
- The template path is now themes/custom/storybook/src/templates/content/.
- You will also notice that the article is using the custom markup we wrote for the Card component which is more semantic, accessible, but in addition to this, the <article> tag is also inheriting several other attributes that were provided by Drupal through its Attributes variable. See below:
If your card's image size or aspect ratio does not look as the one in Storybook, this is probably due to the image style being used in the Article Teaser view mode. You can address this by:
- Going to the Manage display tab of the Article's Teaser view mode (/admin/structure/types/manage/article/display/teaser).
- Changing the image style for the Image field for one that may work better for your image.
- Preview the article again on the homepage to see if this looks better.
This is only a small example of how to build a simple component in Storybook using Twig and then integrate it with Drupal, so content is rendered in a more semantic and accessible manner. There are many more advantages of implementing a system like this. I hope this was helpful and see the potential of a component-driven environment using Storybook. Thanks for visiting.
Download the code For a full copy of the code base which includes the work in this and the previous post, clone or download the repo and switch to the card branch. The main branch only includes the previous post code.texinfo @ Savannah: Texinfo 7.1.1 released
We have released version 7.1.1 of Texinfo, the GNU documentation format. This is a minor bug-fix release.
It's available via a mirror (xz is much smaller than gz, but gz is available too just in case):
http://ftpmirror.gnu.org/texinfo/texinfo-7.1.1.tar.xz
http://ftpmirror.gnu.org/texinfo/texinfo-7.1.1.tar.gz
Please send any comments to bug-texinfo@gnu.org.
Full announcement:
https://lists.gnu.org/archive/html/bug-texinfo/2024-09/msg00041.html
Test and Code: 222: Import within a Python package
In this episode we're talking about importing part of a package into another part of the same package.
We'll look at: `from . import module` and `from .module import something`
and also: `import package` to access the external API from with the package.
Why would we use `import package` if `from . import api` would work fine?
Learn pytest
- pytest is the number one test framework for Python.
- Learn the basics super fast with Hello, pytest!
- Then later you can become a pytest expert with The Complete pytest Course
- Both courses are at courses.pythontest.com
Debian Brasil: Testing feed in English
Testing the feed in English and check If it's going to Debian Planet.
TechBeamers Python: Pass by Reference vs Pass by Value in Python
Is Python pass by reference or pass by value? This question intrigues every Python programmer coming from a C or Java background. In this tutorial, you will get its answer and learn the meaning of “pass by reference” and “pass by value” along with their difference in Python. Python Pass by Reference vs Pass by […]
The post Pass by Reference vs Pass by Value in Python appeared first on TechBeamers.
Python Insider: Python 3.13.0RC2, 3.12.6, 3.11.10, 3.10.15, 3.9.20, and 3.8.20 are now available!
Hi there!
A big joint release today. Mostly security fixes but we also have the final release candidate of 3.13 so let’s start with that!
Final opportunity to test and find any show-stopper bugs before we bless and release 3.13.0 final on October 1st.
Get it here: Python Release Python 3.13.0rc2 | Python.org
Call to actionWe strongly encourage maintainers of third-party Python projects to prepare their projects for 3.13 compatibilities during this phase, and where necessary publish Python 3.13 wheels on PyPI to be ready for the final release of 3.13.0. Any binary wheels built against Python 3.13.0rc2 will work with future versions of Python 3.13. As always, report any issues to the Python bug tracker.
Please keep in mind that this is a preview release and while it’s as close to the final release as we can get it, its use is not recommended for production environments.
Core developers: time to work on documentation now- Are all your changes properly documented?
- Are they mentioned in What’s New?
- Did you notice other changes you know of to have insufficient documentation?
As a reminder, until the final release of 3.13.0, the 3.13 branch is set up so that the Release Manager (@thomas) has to merge the changes. Please add him (@Yhg1s on GitHub) to any changes you think should go into 3.13.0. At this point, unless something critical comes up, it should really be documentation only. Other changes (including tests) will be pushed to 3.13.1.
New features in Python 3.13- A new and improved interactive interpreter, based on PyPy’s, featuring multi-line editing and color support, as well as colorized exception tracebacks.
- An experimental free-threaded build mode, which disables the Global Interpreter Lock, allowing threads to run more concurrently. The build mode is available as an experimental feature in the Windows and macOS installers as well.
- A preliminary, experimental JIT, providing the ground work for significant performance improvements.
- The locals() builtin function (and its C equivalent) now has well-defined semantics when mutating the returned mapping, which allows debuggers to operate more consistently.
- The (cyclic) garbage collector is now incremental, which should mean shorter pauses for collection in programs with a lot of objects.
- A modified version of mimalloc is now included, optional but enabled by default if supported by the platform, and required for the free-threaded build mode.
- Docstrings now have their leading indentation stripped, reducing memory use and the size of .pyc files. (Most tools handling docstrings already strip leading indentation.)
- The dbm module has a new dbm.sqlite3 backend that is used by default when creating new files.
- The minimum supported macOS version was changed from 10.9 to 10.13 (High Sierra). Older macOS versions will not be supported going forward.
- WASI is now a Tier 2 supported platform. Emscripten is no longer an officially supported platform (but Pyodide continues to support Emscripten).
- iOS is now a Tier 3 supported platform, with Android on the way as well.
This is an expedited release for 3.12 due to security content. The schedule returns back to regular programming in October.
One notable change for macOS users: as mentioned in the previous release of 3.12, this release drops support for macOS versions 10.9 through 10.12. Versions of macOS older than 10.13 haven’t been supported by Apple since 2019, and maintaining support for them has become too difficult. (All versions of Python 3.13 have already dropped support for them.)
Get it here: Python Release Python 3.12.6 | Python.org
92 commits.
Python 3.11.10Python 3.11 joins the elite club of security-only versions with no binary installers.
Get it here: Python Release Python 3.11.10 | Python.org
28 commits.
Python 3.10.15Get it here: Python Release Python 3.10.15 | Python.org
24 commits.
Python 3.9.20Get it here: Python Release Python 3.9.20 | Python.org
22 commits.
Python 3.8.20Python 3.8 is very close to End of Life (see the Release Schedule). Will this be the last release of 3.8 ever? We’ll see… but now I think I jinxed it.
Get it here: Python Release Python 3.8.20 | Python.org
22 commits.
Security content in today’s releases- gh-123678 and gh-116741: Upgrade bundled libexpat to 2.6.3 to fix CVE-2024-28757, CVE-2024-45490, CVE-2024-45491 and CVE-2024-45492.
- gh-118486: os.mkdir() on Windows now accepts mode of 0o700 to restrict the new directory to the current user. This fixes CVE-2024-4030 affecting tempfile.mkdtemp() in scenarios where the base temporary directory is more permissive than the default.
- gh-123067: Fix quadratic complexity in parsing "-quoted cookie values with backslashes by http.cookies. Fixes CVE-2024-7592.
- gh-113171: Fixed various false positives and false negatives in IPv4Address.is_private, IPv4Address.is_global, IPv6Address.is_private, IPv6Address.is_global. Fixes CVE-2024-4032.
- gh-67693: Fix urllib.parse.urlunparse() and urllib.parse.urlunsplit() for URIs with path starting with multiple slashes and no authority. Fixes CVE-2015-2104.
- gh-121957: Fixed missing audit events around interactive use of Python, now also properly firing for python -i, as well as for python -m asyncio. The event in question is cpython.run_stdin.
- gh-122133: Authenticate the socket connection for the socket.socketpair() fallback on platforms where AF_UNIX is not available like Windows.
- gh-121285: Remove backtracking from tarfile header parsing for hdrcharset, PAX, and GNU sparse headers. That’s CVE-2024-6232.
- gh-114572: ssl.SSLContext.cert_store_stats() and ssl.SSLContext.get_ca_certs() now correctly lock access to the certificate store, when the ssl.SSLContext is shared across multiple threads.
- gh-102988: email.utils.getaddresses() and email.utils.parseaddr() now return ('', '') 2-tuples in more situations where invalid email addresses are encountered instead of potentially inaccurate values. Add optional strict parameter to these two functions: use strict=False to get the old behavior, accept malformed inputs. getattr(email.utils, 'supports_strict_parsing', False) can be use to check if the strict paramater is available. This improves the CVE-2023-27043 fix.
- gh-123270: Sanitize names in zipfile.Path to avoid infinite loops (gh-122905) without breaking contents using legitimate characters. That’s CVE-2024-8088.
- gh-121650: email headers with embedded newlines are now quoted on output. The generator will now refuse to serialize (write) headers that are unsafely folded or delimited; see verify_generated_headers. That’s CVE-2024-6923.
- gh-119690: Fixes data type confusion in audit events raised by _winapi.CreateFile and _winapi.CreateNamedPipe.
- gh-116773: Fix instances of <_overlapped.Overlapped object at 0xXXX> still has pending operation at deallocation, the process may crash.
- gh-112275: A deadlock involving pystate.c’s HEAD_LOCK in posixmodule.c at fork is now fixed.
Upgrading is highly recommended to all users of affected versions.
Thank you for your supportThanks to all of the many volunteers who help make Python Development and these releases possible! Please consider supporting our efforts by volunteering yourself or through organization contributions to the Python Software Foundation.
–
Łukasz Langa @ambv
on behalf of your friendly release team,
Ned Deily @nad
Steve Dower @steve.dower
Pablo Galindo Salgado @pablogsal
Łukasz Langa @ambv
Thomas Wouters @thomas
Paul Wise: FLOSS Activities August 2024
This month I didn't have any particular focus. I just worked on issues in my info bubble.
Changes- duck: add indicators (1 2)
- Debian wiki pages: PortsDocs/New, Rust
- Debian publicity: reviewed Debian birthday post
- Debian servers: contributed to a review of current Debian Partners
- Respond to queries from Debian users and contributors on IRC
All work was done on a volunteer basis.
Oliver Davies' daily list: Find bugs sooner
Whilst speaking with Dave Liddament last week, I remembered a slide I've seen in some of his previous presentations, such as Effective Code Review.
On the slide is a graph that shows the amount of time needed to fix a bug at different stages of the development lifecycle.
Fixing a bug is the quickest and simplest when writing code.
It's harder when being code reviewed or QA or client tested, more so when it's being released, and the most difficult and expensive once it's in the maintenance phase.
Once it's live in the production environment, there's additional cleanup work to do which adds to the time and cost, and potentially damages your reputation.
The sooner you can find a bug, the better.
This is where tools such as automated testing, static analysis and CI pipelines shine and make it easier for you to find and fix potential bugs sooner.
KDE Goals - A New Cycle Begins
The KDE community has charted its course for the coming years, focusing on three interconnected paths that converge on a single point: community. These paths aim to improve user experience, support developers, and foster community growth.
Streamlined Application Development ExperienceThis goal focuses on improving the application development process. By making it easier for developers to create applications, KDE hopes to attract more contributors and deliver better software for both first-party and third-party applications. A notable task within this goal is enhancing the experience of building KDE apps with languages beyond C++, such as Rust or Python.
Champions: Nicolas Fella and Nate Graham
We care about your InputKDE has a diverse users base with unique input needs: artists using complex monitor and drawing tablet setups; gamers with controllers, fancy mice, and handhelds; users requiring accessibility features or using a language optimally types with complex input methods; students with laptops, 2-in-1s, and tablets — and more! While KDE has made significant progress in supporting these diverse sources of input over the years, there are still gaps to be addressed. This goal aims to close those gaps and deliver a truly seamless input experience for everyone.
Champions: Gernot Schiller, Jakob Petsovits and Joshua Goins
KDE Needs You! 🫵KDE’s growth depends on new contributors, but a lack of fresh involvement in key projects like Plasma, Kdenlive, Krita, GCompris, and others is a concern. This goal focuses on formalizing and enhancing recruitment processes, not just for individuals but also for institutions. Ensuring that bringing in new talent becomes a continuous and community-wide priority, vital for KDE's long-term sustainability.
Champions: Aniqa Khokhar, Johnny Jazeix and Paul Brown
Join us!Your voice, your code, and your ideas are what will shape the KDE of tomorrow — whether you're a user, developer, or contributor. Let’s go on this journey together and make these goals a reality!
Join the Matrix room and keep an eye on the website for the latest KDE Goals updates.
Python Morsels: Creating Python programs
Python programs are created in code editors, and can be run using system command prompt.
Table of contents
- The Python REPL
- Definitions: program, script, command-line, editor
- Creating a Python program in a code editor
- Running our Python program
- Printing to see program output
- Python programs are not launched from the REPL
- Different operating systems
- Python scripts are run from the command prompt or terminal
This is the Python REPL, also known as the Interactive Python Interpreter:
>>>How can I tell it's the Python REPL?
Well, the prompt shows three greater than signs (>>>), which indicates that we're in the Python REPL.
Typing all of your code in the Python REPL is pretty limiting.
Our code disappears right after we've typed it. Also, if we'd like someone to be able to import our code as a module, they can't.
Definitions: program, script, command-line, editorLet's make a Python program.
Read the full article: https://www.pythonmorsels.com/creating-python-programs/Django Weblog: Djangonaut Space - New session 2024
We are thrilled to announce that Djangonaut Space, a mentorship program, is open for applicants for our next cohort!
Djangonaut Space is holding a third session this year! This session will start on October 14th, 2024. We are accepting applications until September 14th, 2024. More details can be found in the website.
Djangonaut Space is a free, 8-week group mentoring program where individuals will work self-paced in a semi-structured learning environment. It seeks to help members of the community who wish to level up their current Django code contributions and potentially take on leadership roles in Django in the future.
“I signed up for this program with the goal of starting my journey as a contributor, but I ended up gaining so much more. In this community, I found incredible people who not only guide you toward solutions but also encourage and celebrate every achievement along the way.” - Raffaella, DjangonautIf you have questions, they are holding an AMA session on Zoom next week. See their social media account for more details:
Wim Leers: XB week 14: early christmas tree
How does cta1href sound to you? Gibberish, right? :D
Jesse “jessebaker” Baker pointed out that Experience Builder (XB) in its current state was subjecting its users to such nonsense! Fortunately, thanks to every Single Directory Component (SDC) specifying a title for each prop, we were able to automatically generate the much more readable CTA 1 link — thanks to foundations Ben “bnjmnm” Mullins did in #3461422 from 3 weeks prior.
Utkarsh “utkarsh_33” and Omkar “omkar-pd” Deshpande eliminated an extraneous “preview” request from the client, hence improving performance (as well as sanity).
Ben & Jesse made XB’s Cypress end-to-end tests leap massively ahead (especially compared to Drupal core’s use of Nightwatch), by introducing cypress-terminal-report. The resulting test failure output on GitLab CI makes it far easier to figure out where something is going wrong: a big productivity boost!
Two weeks ago I alluded to it, and now it finally happened: after months of getting basic infrastructure off the ground, we now finally were able to Kyle “ctrladel” Einecker’s set of representative SDCs that Lauri approved, Ivan “finnsky” Berdinsky and I reviewed, and Ted “tedbow” Bowman pushed across the finish line.
(Not everything Kyle proposed landed, because XB and the SDC subsystem do not yet have all the capabilities needed for some of the SDCs he wrote — see the follow-up if you’re interested.)
{kind=link}
Issue #3446722, image by me.
Some of the people working full-time on XB are doing so using DDEV. And running end-to-end tests that use WebDriver with both the test runner and the system under test living in a Docker container turns out to be quite challenging! Besides us, we know that many (most?) in the community use a DDEV-based development environment, and we’d love to welcome as many contributors as possible. Not being able to run the most important tests of all then is of course quite a problem.
That’s why Travis “traviscarden” Carden had been diligently (he actually joined a few weeks ago!) working on making that painless. The result: the ddev-drupal-xb-dev DDEV add-on — once installed, running (and seeing!) the XB end-to-end tests requires only ddev xb-cypress-open :)
Missed a prior week? See all posts tagged Experience Builder.
Goal: make it possible to follow high-level progress by reading ~5 minutes/week. I hope this empowers more people to contribute when their unique skills can best be put to use!
For more detail, join the #experience-builder Slack channel. Check out the pinned items at the top!
Feliksas “f.mazeikis” Mazeikis is back full-time on XB, and he’s started working on the super important #3463999: Auto-create/update Component config entities for all discovered SDCs that meet XB’s minimum criteria. It’s a critical piece in making Lauri’s product vision come to life: it will ensure that any SDC that we’re confident will work in XB becomes available automatically.1 While working on that, he discovered that there was a pretty big oversight in the StorablePropShape work I landed two weeks ago: in some places Drupal core does not distinguish between “instance settings” and “storage settings” at all (and nor did the code I landed then), but in some places it actually does. Felix was running into that now, thanks to config validation, and so he fixed that.
Many of the things that happened this week were on the “enablement” side of things. Nonetheless, the XB UI also made progress:
- Harumi “hooroomoo” Jang and Jesse landed the updated “insert” UX and hierarchy view, based on the updated design.
- But, most importantly, nicely rounding out this post by combining “enablement” and improved UX: Bálint “balintbrews” Kléri implemented error boundaries. In principle, you should never see these, but we all occasionally have internet connection issues. At those times, Bálint’s “Try again” addition works beautifully :)
(And as a bonus it accelerates debugging failing server responses!)
{kind=link}
Issue #3461431, image by Bálint.
Thanks to Travis for reviewing this!
Week 14 was August 12–18, 2024.
-
At this early stage, it’ll happen indiscriminately. Later, we’ll ensure that on production environments no new SDCs will be made available to the Content Creator without explicit approval by the Site Builder. See the first steps towards auditability of the available XB components if you’re interested in this aspect. ↩︎
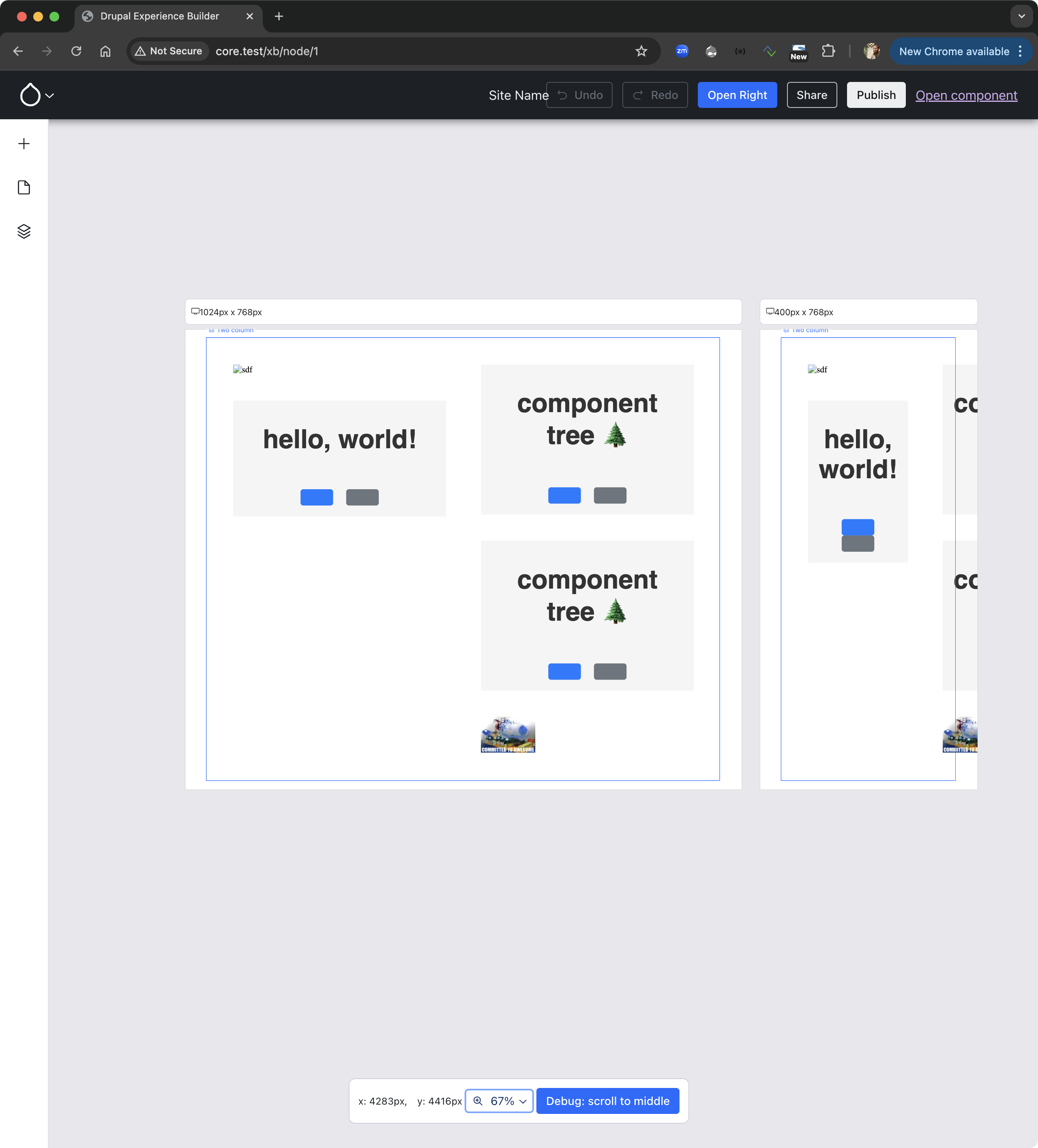{kind=link}
{kind=link}
Pages
Recent Publications
- Managing Hidden Dependencies in OO Software: a Study Based on Open Source Projects
- Open Source Communities as Liminal Ecosystems
- Investigating developers' email discussions during decision-making in Python language evolution
- Developers, Quality Control and Download Volume in Open Source Software (OSS) Projects